 Датчик силы
Датчик силы
Внешний вид, устройство, принципы действия цифровых датчиков кардинально отличается от аналоговых измерительных приборов. Датчики цифровой лаборатории как измерительные приборы состоят из узлов и деталей, которые воспринимают измеряемую величину, преобразуют ее до значений напряжения, находящихся в диапазоне 0 - 5 В, далее электрический сигнал отправляется на аналого-цифровой преобразователь устройства регистрации и сбора данных.
В статье пойдет речь о датчике силы цифровой лаборатории «Архимед», которая была приобретена в кабинет физики СПб АППО в 2013 г.
Информацию об инструментальной погрешности датчика силы найти не удалось. Многочисленные прямые измерения с использованием датчика силы позволяют сделать предположение, что инструментальная погрешность датчика силы на пределе ± 10Н составляет 1%; инструментальная погрешность датчика силы на пределе ± 50Н составляет 2%.
Примечание 1: инструментальная погрешность датчика соизмерима с погрешностью школьного лабораторного динамометра.
Рассмотрим некоторые применения датчика силы в комплекте с цифровой лабораторией «Архимед».
Опыт 1. «Демонстрация свойств силы трения покоя»
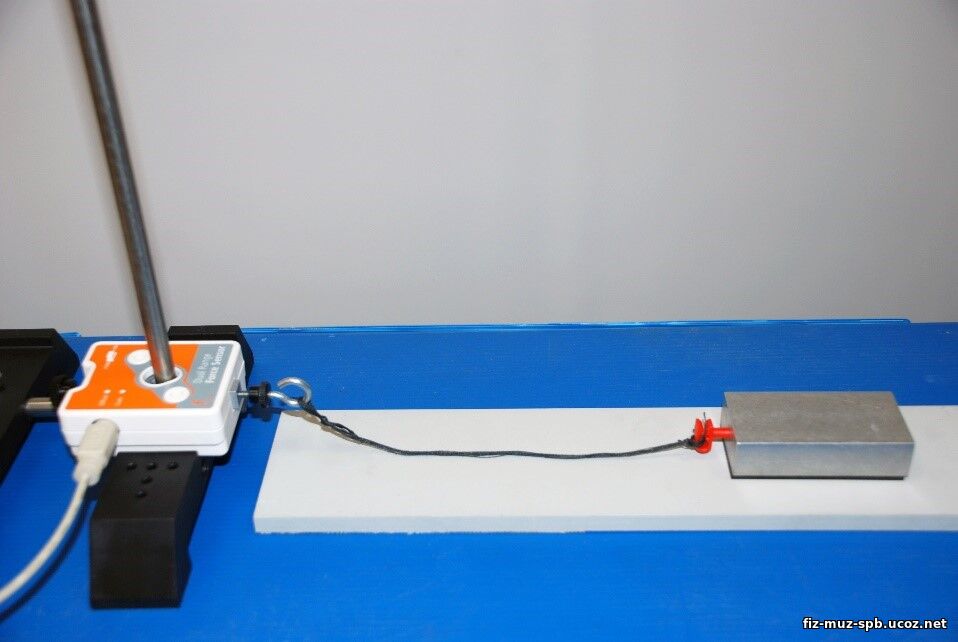
В условиях традиционной демонстрации (движение бруска по горизонтальной поверхности с помощью динамометра) зафиксировать максимальную силу трения покоя удается примерно, т.к. процесс «сдвигания» бруска с места происходит быстро. При этом демонстрацию приходиться повторять несколько раз. Замена демонстрационного динамометра датчиком силы позволяет не только измерить силу трения покоя, но и зафиксировать кратковременный процесс изменения силы трения покоя от нуля до максимального значения (рис.2). Во время демонстрации с датчиком силы, который закреплен неподвижно в штативе, необходимо двигать планку на которой лежит брусок (рис.1).
Анализ результатов опыта 1.
Совместное использование простого и хорошо известного демонстрационного оборудования с элементами цифровой лаборатории обеспечивает наглядность, научность и достоверность демонстрации, не вызывает сомнений и не дает повода к неправильному толкованию содержания демонстрации.
Примечание 2. Посмотреть на установку для изучения силы трения покоя, которой более 150 лет можно ЗДЕСЬ.
Опыт 2. «Взаимодействие упругих тел»
Явления взаимодействия тел, в частности упругие и неупругие соударения, во многом определяют содержание раздела курса механики «Законы сохранения в механике». Традиционно взаимодействие тел рассматривается на примере соударения тележек, которые свободно перемещаются по направляющей. Установка, необходимая для проведения наблюдений, содержит много компонентов и требует настройки, поэтому подготовка опыта занимает дополнительное время учителя.
Возможность получения осциллограмм быстропротекающих процессов позволяет расширить и углубить понимание взаимодействия тел. Осциллограмма (рис. 2) позволяет анализировать происходящие процессы и соотносить реальное явление и его графическое описание. Опыт результаты, которого описаны ниже, не сложен в постановке, не требует ни дополнительных ресурсов, ни дополнительных затрат времени.
Таким образом: компьютеризированный демонстрационный опыт соответствует методическим требованиям, предъявляемым к демонстрационным экспериментам: видимость, убедительность, содержательность, наглядность, кратковременность.
В статье пойдет речь о датчике силы цифровой лаборатории «Архимед», которая была приобретена в кабинет физики СПб АППО в 2013 г.
 |
|
| Рисунок 1. Установка для изучения силы трения покоя. | |
| Принцип действия | На концах бруска, который деформируется, установлены тензорные датчики |
| Пределы измерения | ±10 Н; ±50 Н |
| Особенности | При деформации растяжения значение силы отображается как отрицательная величина. При деформации сжатия – как положительная величина |
| Общие габариты | 55×30×70 мм |
Информацию об инструментальной погрешности датчика силы найти не удалось. Многочисленные прямые измерения с использованием датчика силы позволяют сделать предположение, что инструментальная погрешность датчика силы на пределе ± 10Н составляет 1%; инструментальная погрешность датчика силы на пределе ± 50Н составляет 2%.
Примечание 1: инструментальная погрешность датчика соизмерима с погрешностью школьного лабораторного динамометра.
Рассмотрим некоторые применения датчика силы в комплекте с цифровой лабораторией «Архимед».
Опыт 1. «Демонстрация свойств силы трения покоя»
В условиях традиционной демонстрации (движение бруска по горизонтальной поверхности с помощью динамометра) зафиксировать максимальную силу трения покоя удается примерно, т.к. процесс «сдвигания» бруска с места происходит быстро. При этом демонстрацию приходиться повторять несколько раз. Замена демонстрационного динамометра датчиком силы позволяет не только измерить силу трения покоя, но и зафиксировать кратковременный процесс изменения силы трения покоя от нуля до максимального значения (рис.2). Во время демонстрации с датчиком силы, который закреплен неподвижно в штативе, необходимо двигать планку на которой лежит брусок (рис.1).
 |
| Рисунок 2. График изменения силы трения покоя с течением времени |
Анализ результатов опыта 1.
| Промежуток времени | Условие опыта | Изменение силы | Примечание |
| 0-t1 | Планка в покое | 0 | Нулевое значение силы не выставлено, что не мешает анализу результатов. |
| Момент t1 | Начало движения планки | 0 | Брусок относительно планки неподвижен |
| t1 - t2 | Движение планки | 0,4 Н - 1,5 Н | Брусок относительно планки неподвижен |
| Момент t2 | Движение планки Максимальное значение | 1,1 Н | Начало движения бруска относительно планки |
Совместное использование простого и хорошо известного демонстрационного оборудования с элементами цифровой лаборатории обеспечивает наглядность, научность и достоверность демонстрации, не вызывает сомнений и не дает повода к неправильному толкованию содержания демонстрации.
Примечание 2. Посмотреть на установку для изучения силы трения покоя, которой более 150 лет можно ЗДЕСЬ.
 |
| Рисунок 1. Коллаж «Установка для изучения упругого удара» |
Явления взаимодействия тел, в частности упругие и неупругие соударения, во многом определяют содержание раздела курса механики «Законы сохранения в механике». Традиционно взаимодействие тел рассматривается на примере соударения тележек, которые свободно перемещаются по направляющей. Установка, необходимая для проведения наблюдений, содержит много компонентов и требует настройки, поэтому подготовка опыта занимает дополнительное время учителя.
Возможность получения осциллограмм быстропротекающих процессов позволяет расширить и углубить понимание взаимодействия тел. Осциллограмма (рис. 2) позволяет анализировать происходящие процессы и соотносить реальное явление и его графическое описание. Опыт результаты, которого описаны ниже, не сложен в постановке, не требует ни дополнительных ресурсов, ни дополнительных затрат времени.
 |
| Рисунок 4 |
| Первый пик | Удар шара о платформу: происходит деформация платформы, сила упругости, возникающая в платформе, увеличивается от нуля до максимального значения. |
| Затухающие колебания | Под действием силы упругости, возникающей в платформе, шарик отскакивает; сила упругости уменьшается, платформа совершает свободные колебания. |
| Второй пик | Шарик, потеряв часть кинетической энергии, опять ударяет в платформу и деформирует ее меньше. |
| Множественные пики | Процесс повторяется, пока шарик не остановится. |
Таким образом: компьютеризированный демонстрационный опыт соответствует методическим требованиям, предъявляемым к демонстрационным экспериментам: видимость, убедительность, содержательность, наглядность, кратковременность.
|
|
 |